Material Required
- Printoo Core
- DC Motors Drivers & one Motor (Fan)
- Bluetooth 4.0 Module
- LiPo battery
- Smartphone
Schematic
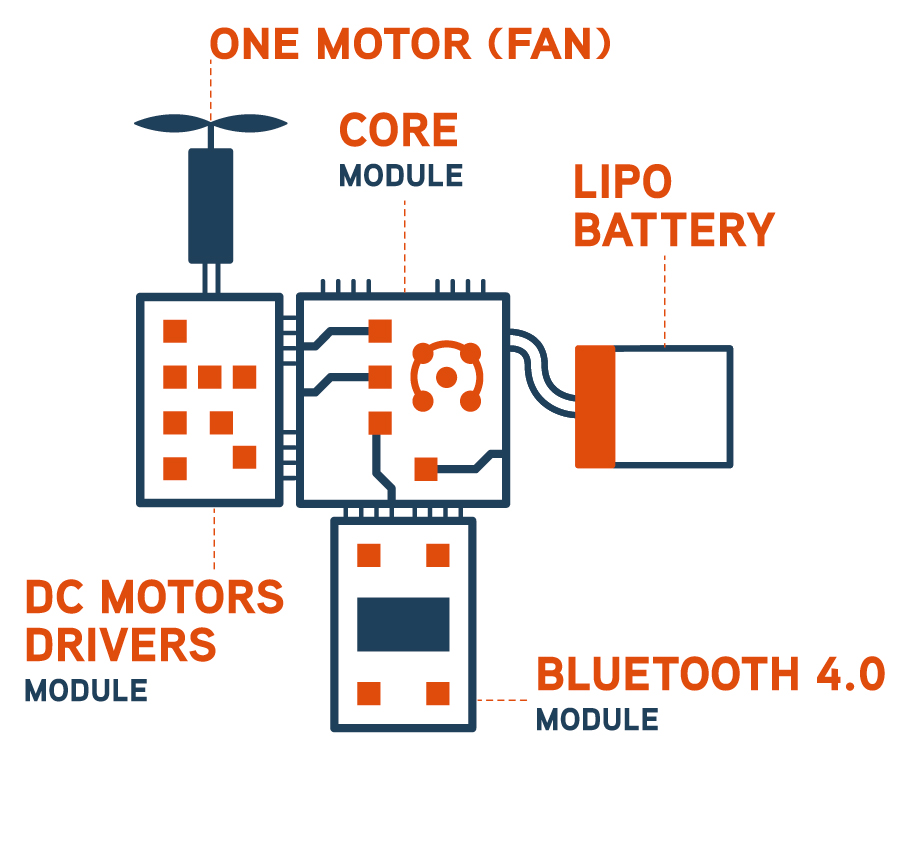
Schematic: Bluetooth Fan
Code
- /**********************************************************************
- * © 2014 YD Ynvisible, S.A.
- *
- * FileName: Bluetooth_Fan.ino
- * Dependencies: SoftwareSerial.h
- * Processor: ATmega328
- * IDE: Arduino 1.0.5
- *
- * Description:
- * Fan activated by a smartphone via Bluetooth 4.0
- * Sending '#' activates the fan
- **********************************************************************/
- #include <SoftwareSerial.h> //Software Serial Port
- #define RxD 11 //Bluetooth TX=Core RX
- #define TxD 12 //Bluetooth RX=Core TX
- int motor1_pwm=6; //Motor1 PWM
- int motor1_dir=7; //Motor1 Direction
- char recvChar=0;
- SoftwareSerial blueToothSerial(RxD,TxD);
- void setup()
- {
- pinMode(RxD, INPUT);
- pinMode(TxD, OUTPUT);
- pinMode(motor1_pwm, OUTPUT);
- pinMode(motor1_dir, OUTPUT);
- digitalWrite(motor1_pwm,LOW);
- digitalWrite(motor1_dir,LOW);
- setupBlueToothConnection();
- }
- void loop()
- {
- if(blueToothSerial.available()){ //check if the pipe is free
- recvChar = blueToothSerial.read();
- if(recvChar=='#'){
- analogWrite(motor1_pwm,40);
- digitalWrite(motor1_dir,LOW);
- }
- else{
- analogWrite(motor1_pwm,0);
- digitalWrite(motor1_dir,LOW);
- }
- }
- }
- void setupBlueToothConnection(){
- blueToothSerial.begin(9600); //Set BluetoothBee BaudRate to default baud rate 9600
- delay(10); // This delay is required.
- blueToothSerial.print("AT+RENEW"); //Restore all setup value to factory setup
- delay(10); // This delay is required.
- blueToothSerial.print("AT+ROLE0"); //make it a slave
- delay(10); // This delay is required.
- }
- //END
/**********************************************************************
* © 2014 YD Ynvisible, S.A.
*
* FileName: Bluetooth_Fan.ino
* Dependencies: SoftwareSerial.h
* Processor: ATmega328
* IDE: Arduino 1.0.5
*
* Description:
* Fan activated by a smartphone via Bluetooth 4.0
* Sending '#' activates the fan
**********************************************************************/
#include <SoftwareSerial.h> //Software Serial Port
#define RxD 11 //Bluetooth TX=Core RX
#define TxD 12 //Bluetooth RX=Core TX
int motor1_pwm=6; //Motor1 PWM
int motor1_dir=7; //Motor1 Direction
char recvChar=0;
SoftwareSerial blueToothSerial(RxD,TxD);
void setup()
{
pinMode(RxD, INPUT);
pinMode(TxD, OUTPUT);
pinMode(motor1_pwm, OUTPUT);
pinMode(motor1_dir, OUTPUT);
digitalWrite(motor1_pwm,LOW);
digitalWrite(motor1_dir,LOW);
setupBlueToothConnection();
}
void loop()
{
if(blueToothSerial.available()){ //check if the pipe is free
recvChar = blueToothSerial.read();
if(recvChar=='#'){
analogWrite(motor1_pwm,40);
digitalWrite(motor1_dir,LOW);
}
else{
analogWrite(motor1_pwm,0);
digitalWrite(motor1_dir,LOW);
}
}
}
void setupBlueToothConnection(){
blueToothSerial.begin(9600); //Set BluetoothBee BaudRate to default baud rate 9600
delay(10); // This delay is required.
blueToothSerial.print("AT+RENEW"); //Restore all setup value to factory setup
delay(10); // This delay is required.
blueToothSerial.print("AT+ROLE0"); //make it a slave
delay(10); // This delay is required.
}
//END





